1、控制程序的編寫(xiě)
手動(dòng)狀態(tài)下,在組態(tài)畫(huà)面上設(shè)計(jì)了變頻器的控制與輸入給定按鈕,可在自動(dòng)控制系統(tǒng)出現(xiàn)故障時(shí)應(yīng)急使用,輸入值為1~50Hz,即對(duì)應(yīng)該電機(jī)工作的頻率值。
自動(dòng)狀態(tài)下,為保證水塔液位的恒定,必須采用PID閉環(huán)控制。通過(guò)兩線(xiàn)制投入式液位傳感器將液位信號(hào)傳送至PLC,根據(jù)當(dāng)前液位信號(hào)的狀態(tài)計(jì)算出變頻器的控制信號(hào),從而改變變頻器的輸出頻率,使得水塔水位始終保持在目標(biāo)值的范圍內(nèi)。需要說(shuō)明的是,由于溢水對(duì)水塔的損害巨大,所以在PID調(diào)節(jié)水塔液位的同時(shí),還安裝有一個(gè)浮球式液位開(kāi)關(guān),作為上上限的報(bào)警觸發(fā),一旦兩線(xiàn)制液位傳感器發(fā)生故障,導(dǎo)致液位上升到危險(xiǎn)狀態(tài),報(bào)警信號(hào)會(huì)通過(guò)PLC控制,切斷水泵的工作電源。AIW12是高位水池調(diào)節(jié)閥的開(kāi)度值,AQW8是調(diào)節(jié)閥的給定值;AIW14是水塔的液位值,AQW0與AQW4分別是2臺(tái)變頻器的給定值。其它參數(shù)的含義為:Setpoint_R是以百分比為單位的實(shí)數(shù)給定值(SP);Auto_Manual為BOOL型變量,如為1表示該回路為自動(dòng)模式,反之為手動(dòng)模式;MannualOutput是手動(dòng)模式時(shí)標(biāo)準(zhǔn)化的實(shí)數(shù)輸出值。
2、組態(tài)畫(huà)面的設(shè)計(jì)
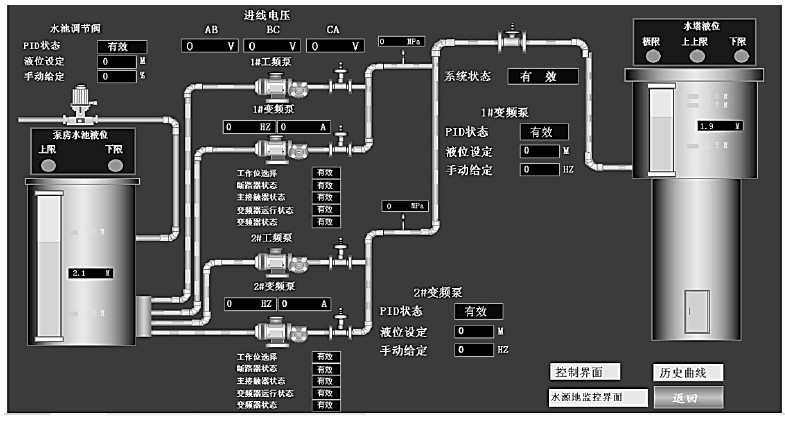
使用組態(tài)王設(shè)計(jì)的主監(jiān)控畫(huà)面如圖所示,圖中左側(cè)為高位水池及其液位調(diào)節(jié)閥,中間為2套供水泵的組合,右側(cè)為目標(biāo)水塔。組態(tài)畫(huà)面主要對(duì)PID狀態(tài)、液位給定、手動(dòng)給定、部分管道上的壓力和變頻器的工作狀態(tài)進(jìn)行監(jiān)視或控制,整個(gè)畫(huà)面準(zhǔn)確、形象的反映了現(xiàn)場(chǎng)的工作情況,為工作人員提供了便捷與可靠的操控方式。另外,與主監(jiān)控畫(huà)面相組合的歷史曲線(xiàn)等畫(huà)面,為減少供水系統(tǒng)故障,分析整個(gè)系統(tǒng)的運(yùn)行趨勢(shì)提供了依據(jù)。

 掃一掃進(jìn)入手機(jī)網(wǎng)址
掃一掃進(jìn)入手機(jī)網(wǎng)址